Final Robot
The design philosophy in constructing the robot was to be as minimal as possible in order to reduce potential points of failure and improve robustness. The robot remains lightweight and has a low center of mass to help during anticipated collisions. The batteries can be easily swapped and all the boards are on the upper levels for easy access and inspection.
Robot CAD
The robot was designed for fabrication with lasercutting, 3D printing, and t-nut construction. This method facilitated rapid fabrication and assembly.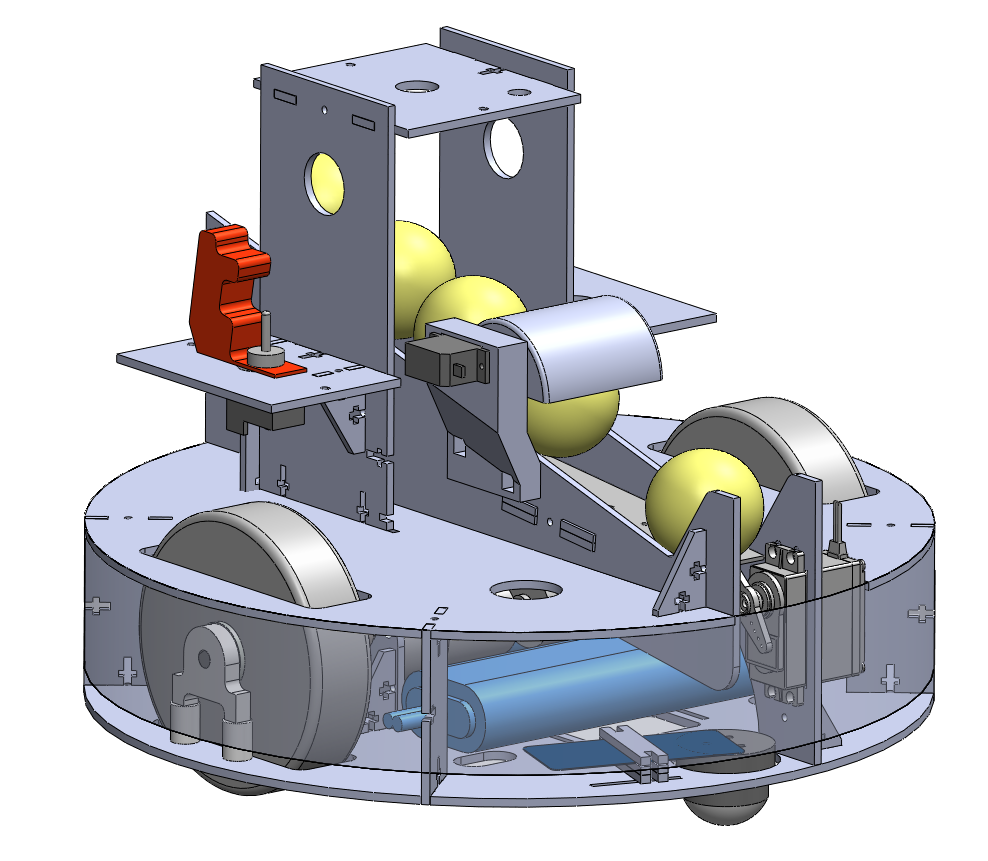
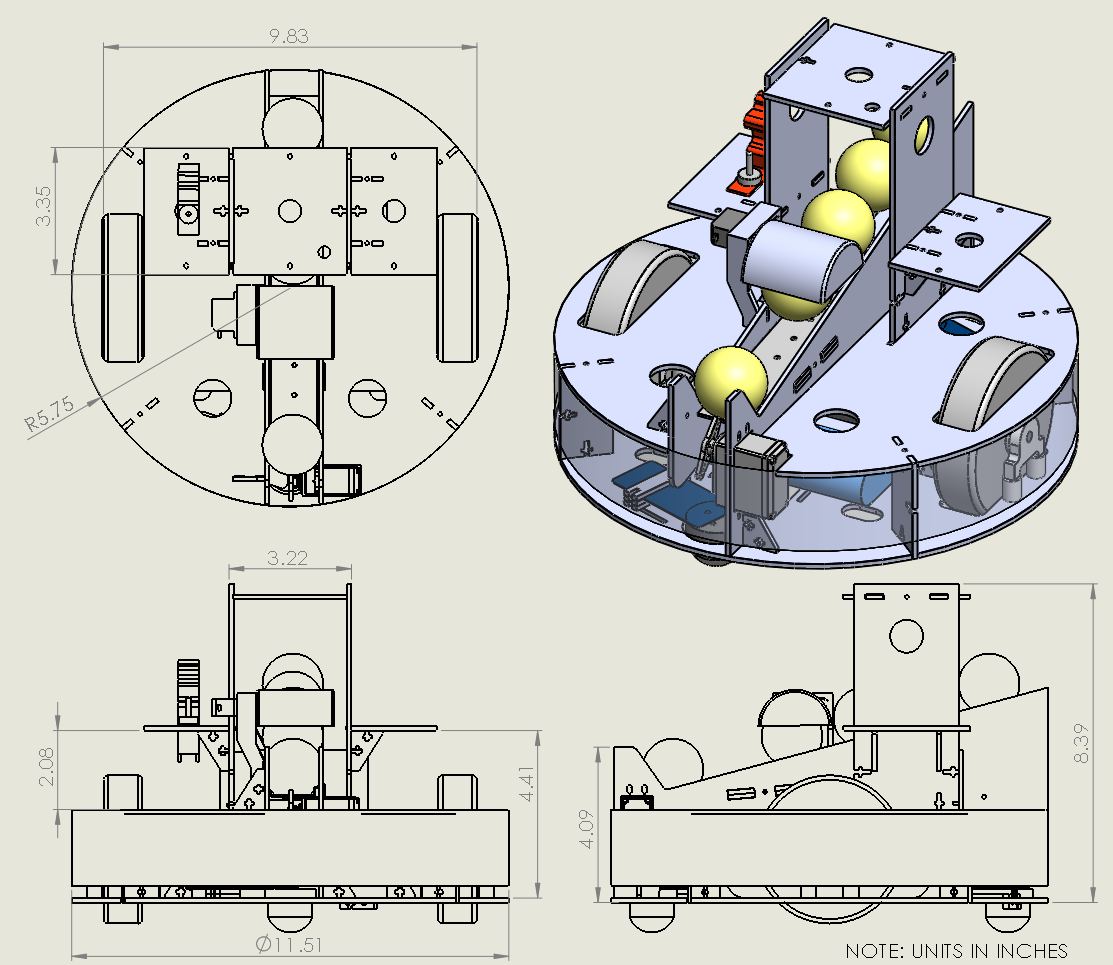
Mechanical Drawings
Robot
The bot maintains a small footprint and is well within the maximum size dimensions of 12 inches cubed. It also features the required bumper guard and kill (safety) switch.
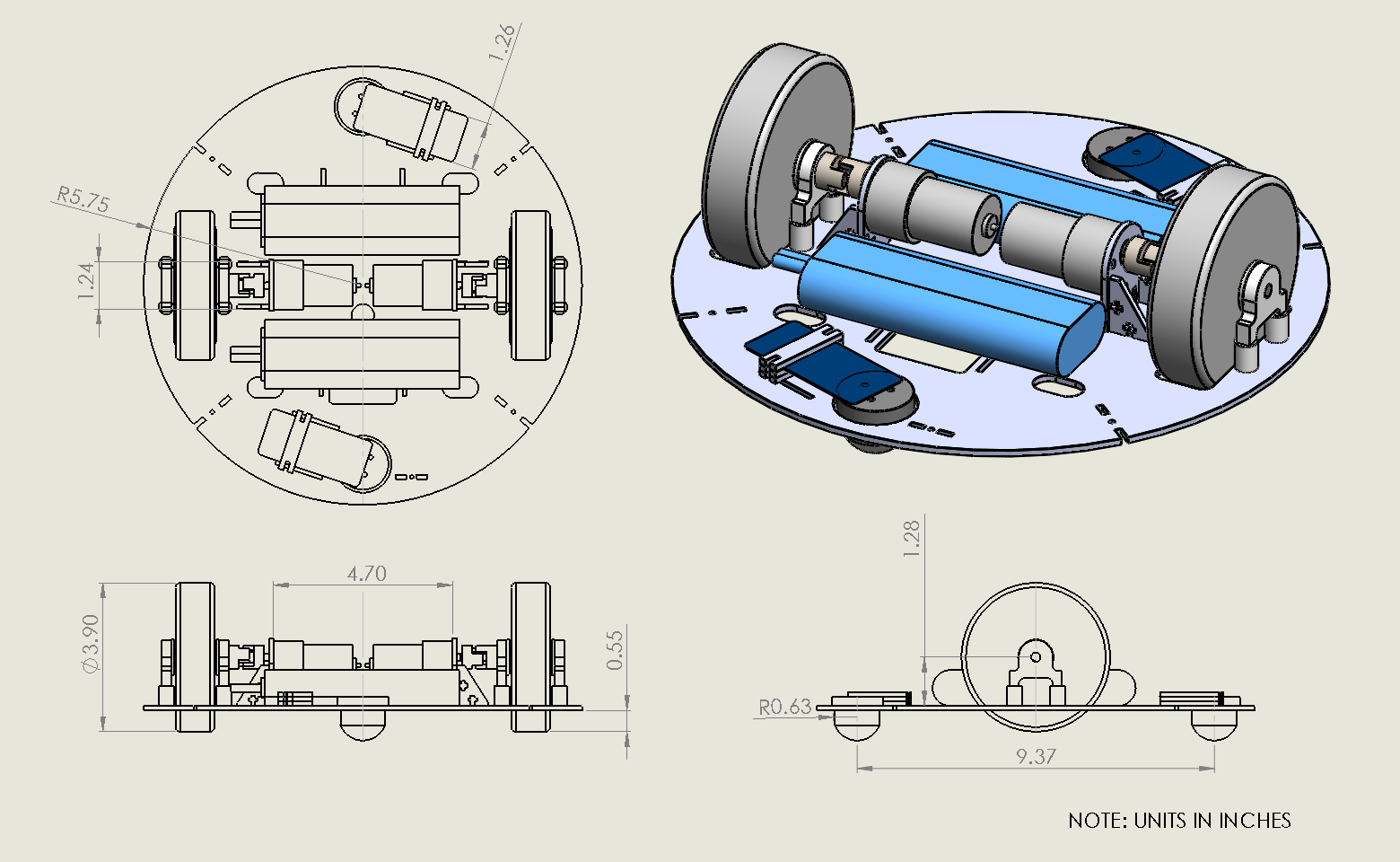
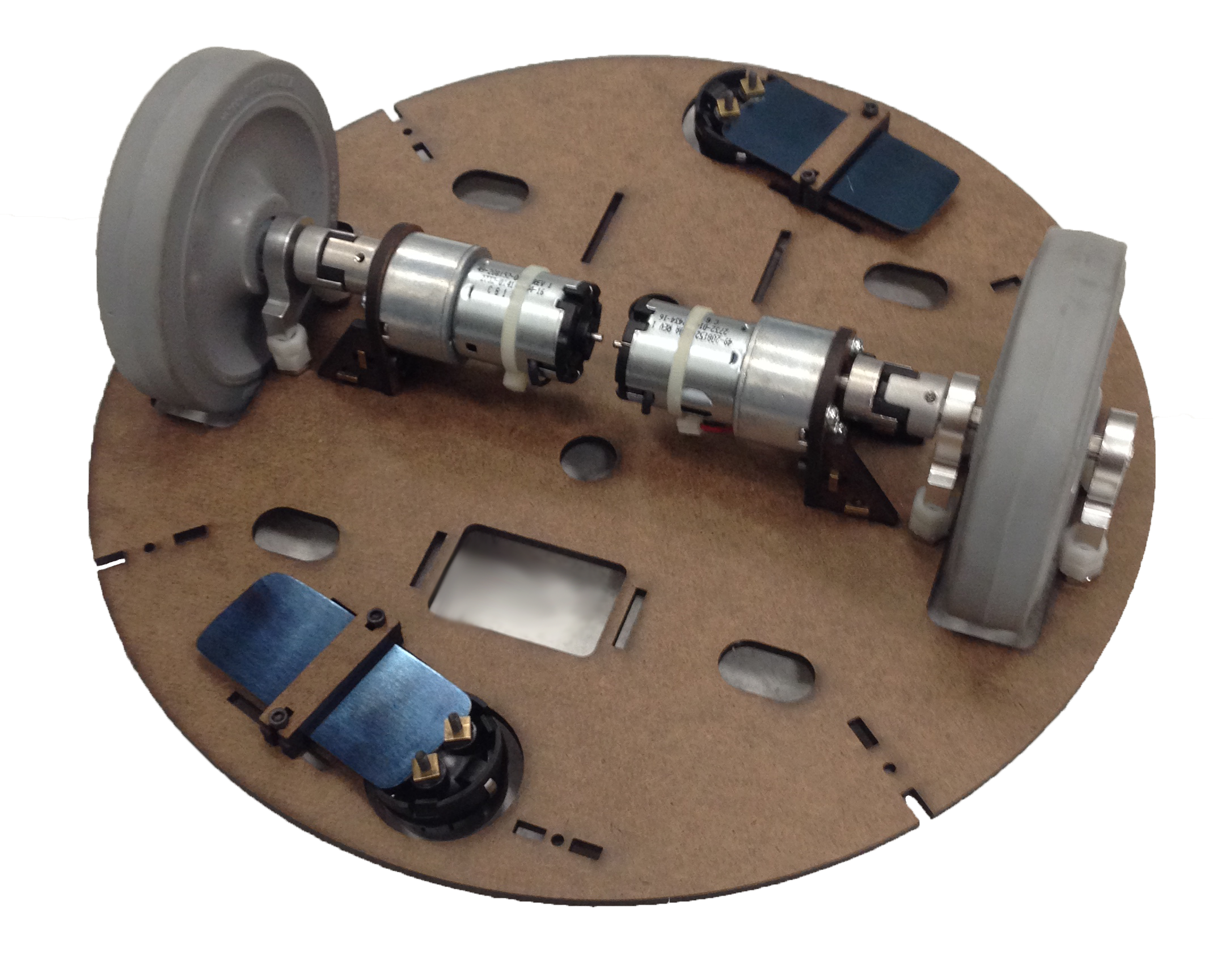
Drivetrain
The drivetrain features medium sized wheels with good grip on the playing field surface and a tunable suspension system made by placing ball casters on compliant beams which improved the robot's stability. When resting with the robot's weight, the drivetrain is about a half inch from the ground.
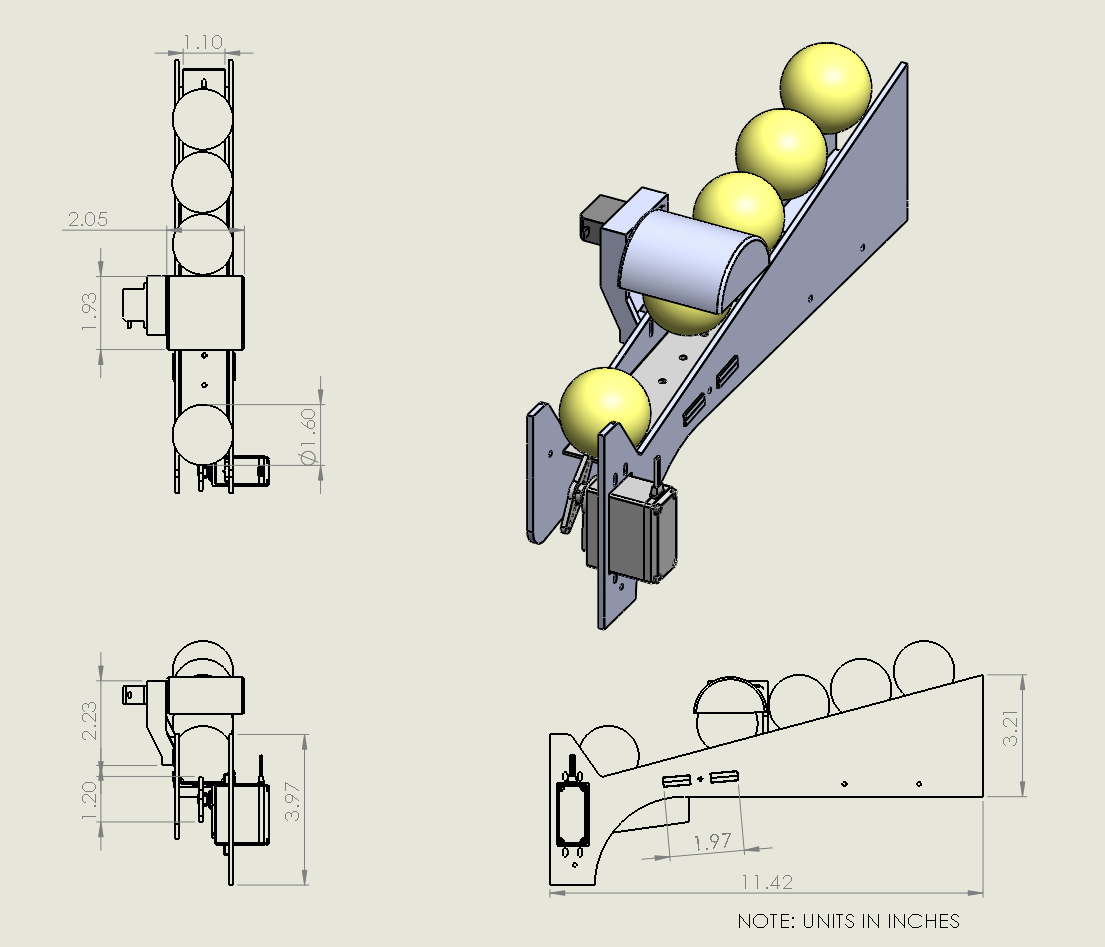
Ball Loader and Shooter
The emphasis on the ball loader and shooter mechanism was simplicity in the construction and repeatability in the actuation. A gate was 3D printed which turned only at a slight angle from its neutral position to pass a ball to the shooter and load the next one. The shooter mechanism consisted of a stainless steel cantilevered beam (ruler) mounted at a 5 degree angle. The strategy for shooting was to get as close as possible to the bucket in order to allow for the greatest amount of error or deviation in consecutive shots. The plan during the game was that if we were winning by enough points, we would attempt to make all five balls in succession in order to lock-out our opponent.
The ball loader mechanism along with the ball shooter mechanism and chosen strategy for scoring buckets can be seen in the linked videos.
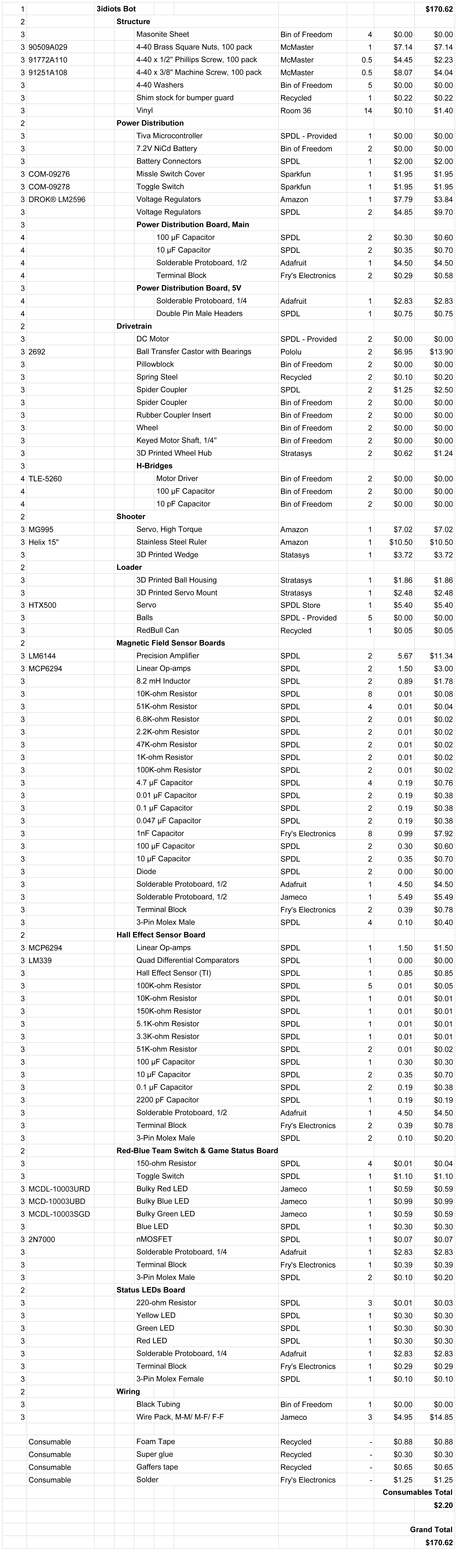
Bill of Materials